Change of Basis
Intuitively, we do not want the effect done by a matrix to depend on the basis we use to express the matrix. For this reason, adjust the entries of the matrix depending on which basis we are using. In this section, we will introduce a consistent way to express the same effect of a matrix in an arbitrary basis.
In the previous section, the elements of the matrix were determined by how they transform the basis vectors. Let’s take a closer look at two different basis in \(\mathbb{R}^2\): a canonical basis \(\{ \mathbf{b_1}, \mathbf{b_2}\}\) and an arbitrary non-canonical basis \(\{\mathbf{d_1}, \mathbf{d_2}\}\) whose elements can be expressed in the canonical basis as:
\[\mathbf{d_1} = \begin{bmatrix} 3/5\\ 1/3 \end{bmatrix}, \, \, \, \, \mathbf{d_2}= \begin{bmatrix} 1/3\\ 1 \end{bmatrix}.\]The two bases are visualized in the figure below.
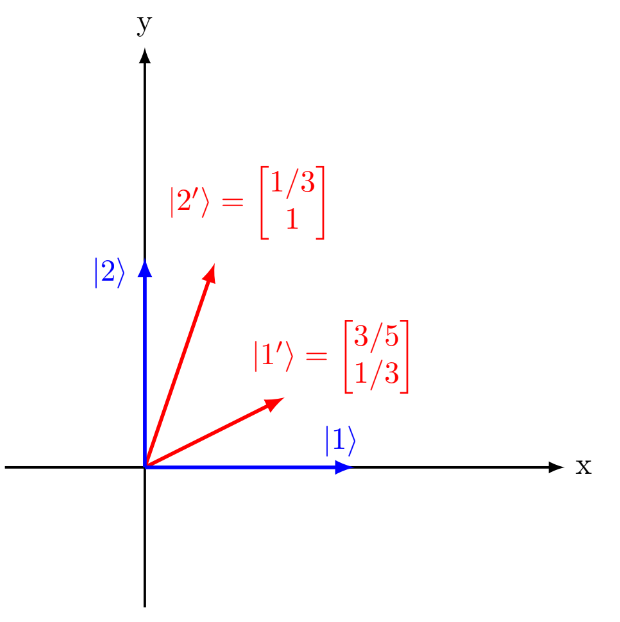
Figure 1: A visual representation of two basis \(\{ \mathbf{b_1}, \mathbf{b_2}\}\) and \(\{\mathbf{d_1}, \mathbf{d_2}\}\).
We can think of a basis as a language we use to explicitly write vectors and operators as matrices. However, the way an arbitrary operator \(\mathbf{A}\) transforms a vector \(\mathbf{v}\) shouldn’t depend on the basis we use. Therefore, we must adjust the entries of the matrix depending on which basis we use, because as described before, rows of the matrix correspond to the vectors to which the basis vectors transform to. So let’s try to motivate intuitively how we can transform a matrix \(\mathbf{A}\) that is written in the canonical basis \(\{ \mathbf{b_1}, \mathbf{b_2}\}\) into a matrix \(\mathbf{A}'\) which describes the same operation, but in the new basis \(\{\mathbf{d_1}, \mathbf{d_2}\}\). The procedure is as follows:
- We take a vector from the written using vectors from the new basis and translate it into a language of the old basis using a transformation \(\mathbf{S}\).1
- We act on this translated vector with the operator \(\mathbf{A}\) expressed in the canonical basis.
- We convert the transformed vector back to the language of the new basis using the inverse transformation \(\mathbf{S}^{-1}\).
So, in total, we can express the change of basis of a matrix as:
\[\boxed{\mathbf{A}' = \mathbf{S}^{-1}\mathbf{A}\mathbf{S} }\]Next question is, what does the transformation \(\mathbf{S}\) between languages correspond to? Well, if we speak the language of the new basis, then we would express the vectors of the new basis as \(\mathbf{d_1} = \begin{bmatrix}1,0\end{bmatrix}^{\text{T}}\) and \(\mathbf{d_2} = \begin{bmatrix}0,1\end{bmatrix}^{\text{T}}\). However, if we want to express these new vectors in the old canonical basis, then we would write them in the form of earlier equation. Therefore, the transformation \(\mathbf{S}\) for this example is equal to:
\[\mathbf{S} = \begin{bmatrix} 3/5 & 1/3\\ 1/3 & 1 \end{bmatrix}.\]The inverse transformation can be found and is equal to:
\[\mathbf{S}^{-1} = \begin{bmatrix} 45/22 & -15/22\\ -15/22 & 27/22 \end{bmatrix},\]which is not the nicest expression, but we can transform any operator \(\mathbf{A}\) written in the canonical basis \(\{ \mathbf{b_1}, \mathbf{b_2}\}\) into a matrix \(\mathbf{A}'\) written in the \(\{\mathbf{d_1}, \mathbf{d_2}\}\) basis.
We can check whether the transformation \(\mathbf{S}^{-1}\) makes sense by for example applying it on the vector \(\mathbf{d_1}\) written in the canonical basis:
\[\mathbf{S}^{-1}\, \mathbf{d_1} = \begin{bmatrix} 45/22 & -15/22\\ -15/22 & 27/22 \end{bmatrix} \begin{bmatrix} 1/3\\ 1 \end{bmatrix} = \begin{bmatrix} 1\\ 0 \end{bmatrix},\]which is exactly the expected result, because if we speak the language of the \(\{\mathbf{d_1}, \mathbf{d_2}\}\) basis, we would write the vector \(\mathbf{d_1}\) as \(\mathbf{d_1} = \begin{bmatrix}1,0\end{bmatrix}^{\text{T}}\).
In this section, we have found a way that ensures that the effect of a matrix doesn’t depend on the basis used. To do so, we adjust the matrix entries depending on the basis. To transform a matrix from the canonical basis to an arbitrary basis, we take a vector from the new basis, transform it to the old basis, apply the matrix, and transform the result back to the new basis.
-
In this context, translation is meant in the context of the language, not as a spatial translation. ↩